













































































































































































































よむ、つかう、まなぶ。
【参考資料1-1】介護ロボット等による生産性向上の取組に関する効果測定事業 報告書 分割1/2 (17 ページ)
出典
| 公開元URL | https://www.mhlw.go.jp/stf/newpage_32841.html |
| 出典情報 | 社会保障審議会介護給付費分科会(第216回 4/27)《厚生労働省》 |
ページ画像
ダウンロードした画像を利用する際は「出典情報」を明記してください。
低解像度画像をダウンロード
プレーンテキスト
資料テキストはコンピュータによる自動処理で生成されており、完全に資料と一致しない場合があります。
テキストをコピーしてご利用いただく際は資料と付け合わせてご確認ください。
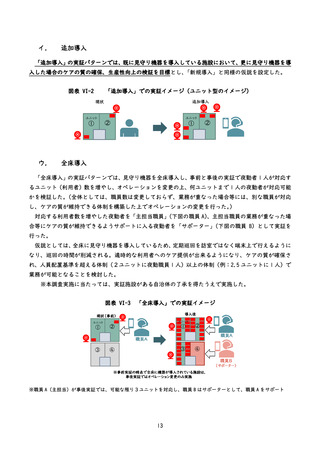
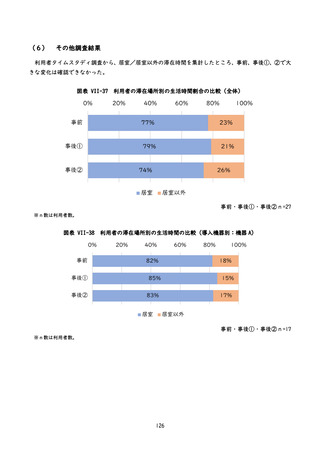
「追加導入」の実証パターンでは、既に見守り機器を導入している施設において、更に見守り機器を導
入した場合のケアの質の確保、生産性向上の検証を目標とし、「新規導入」と同様の仮説を設定した。
図表 VI-2
「追加導入」での実証イメージ(ユニット型のイメージ)
追加導入
現状
ユニット
ユニット
①
②
①
②
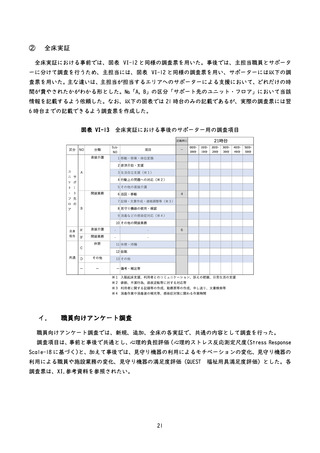
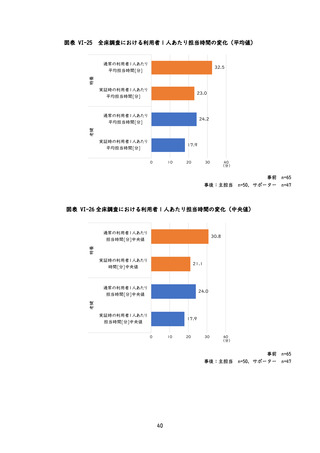
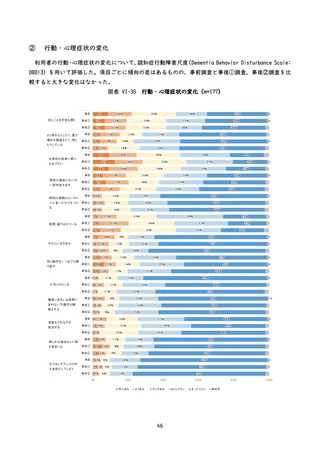
「全床導入」の実証パターンでは、見守り機器を全床導入し、事前と事後の実証で夜勤者 1 人が対応す
るユニット(利用者)数を増やし、オペレーションを変更の上、何ユニットまで 1 人の夜勤者が対応可能
かを検証した。
(全体としては、職員数は変更しておらず、業務が重なった場合等には、別な職員が対応
し、ケアの質が維持できる体制を構築した上でオペレーションの変更を行った。
)
対応する利用者数を増やした夜勤者を「主担当職員」
(下図の職員 A)
、主担当職員の業務が重なった場
合等にケアの質が維持できるようサポートに入る夜勤者を「サポーター」
(下図の職員 B)として実証を
行った。
仮説としては、全床に見守り機器を導入しているため、定期巡回を訪室ではなく端末上で行えるように
なり、巡回の時間が削減される。適時的な利用者へのケア提供が出来るようになり、ケアの質が確保さ
れ、人員配置基準を超える体制(2ユニットに夜勤職員1人)以上の体制(例:2.5 ユニットに 1 人)で
業務が可能となることを検討した。
※本調査実施に当たっては、実証施設がある自治体の了承を得たうえで実施した。
図表 VI-3 「全床導入」での実証イメージ
※職員 A(主担当)が事後実証では、可能な限り3ユニットを対応し、職員 B はサポーターとして、職員 A をサポート
13
入した場合のケアの質の確保、生産性向上の検証を目標とし、「新規導入」と同様の仮説を設定した。
図表 VI-2
「追加導入」での実証イメージ(ユニット型のイメージ)
追加導入
現状
ユニット
ユニット
①
②
①
②
「全床導入」の実証パターンでは、見守り機器を全床導入し、事前と事後の実証で夜勤者 1 人が対応す
るユニット(利用者)数を増やし、オペレーションを変更の上、何ユニットまで 1 人の夜勤者が対応可能
かを検証した。
(全体としては、職員数は変更しておらず、業務が重なった場合等には、別な職員が対応
し、ケアの質が維持できる体制を構築した上でオペレーションの変更を行った。
)
対応する利用者数を増やした夜勤者を「主担当職員」
(下図の職員 A)
、主担当職員の業務が重なった場
合等にケアの質が維持できるようサポートに入る夜勤者を「サポーター」
(下図の職員 B)として実証を
行った。
仮説としては、全床に見守り機器を導入しているため、定期巡回を訪室ではなく端末上で行えるように
なり、巡回の時間が削減される。適時的な利用者へのケア提供が出来るようになり、ケアの質が確保さ
れ、人員配置基準を超える体制(2ユニットに夜勤職員1人)以上の体制(例:2.5 ユニットに 1 人)で
業務が可能となることを検討した。
※本調査実施に当たっては、実証施設がある自治体の了承を得たうえで実施した。
図表 VI-3 「全床導入」での実証イメージ
※職員 A(主担当)が事後実証では、可能な限り3ユニットを対応し、職員 B はサポーターとして、職員 A をサポート
13