













































































































































































































よむ、つかう、まなぶ。
【参考資料1-1】介護ロボット等による生産性向上の取組に関する効果測定事業 報告書 分割1/2 (42 ページ)
出典
| 公開元URL | https://www.mhlw.go.jp/stf/newpage_32841.html |
| 出典情報 | 社会保障審議会介護給付費分科会(第216回 4/27)《厚生労働省》 |
ページ画像
ダウンロードした画像を利用する際は「出典情報」を明記してください。
低解像度画像をダウンロード
プレーンテキスト
資料テキストはコンピュータによる自動処理で生成されており、完全に資料と一致しない場合があります。
テキストをコピーしてご利用いただく際は資料と付け合わせてご確認ください。
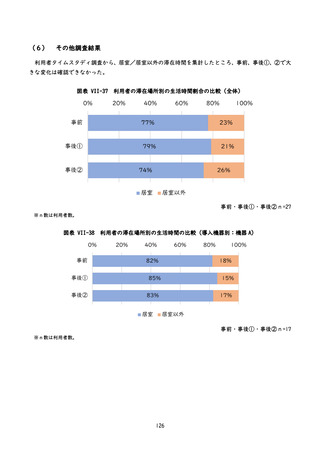
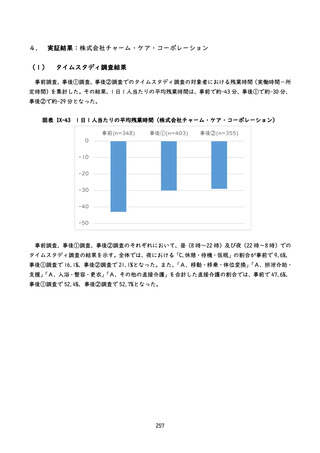
37 施設のうち、28 施設については導入前後の事前調査と事後調査の結果を、9 施設については全床導
入パターンであるため通常時の担当利用者数でみた場合の結果を用いた。また、機器の導入率と直接介
護・巡回・移動時間において、2 次の近似曲線を図中に示す。直接介護+巡回・移動時間と利用者に占め
る見守りセンサーの導入割合の相関を見てみると、導入割合0%の場合の業務時間に対して、導入割合
10%導入では 2.9%減少、導入割合 30%では 6.8%減少、導入割合 50%では 8.4%減少、導入割合 80%
では 6.4%減少する結果となった。
図表 VI-23 は、図表 VI-22 の近似式(y=76.481x2-81.882x+260.02)の x に機器の導入率(10%、30%、50%、
80%)を代入した結果である。
図表 VI-22 機器の導入率と「直接介護」及び「巡視・移動」時間合計の相関Ⅱ(37 施設)
(令和4年度実証結果)
450
事前
事後
400
直接介護+巡回移動時間
350
300
2.9%
6.8%
250
6.4%
8.4%
200
150
100
50
y = 76.481x2 - 81.882x + 260.02
0
0%
20%
40%
60%
80%
100%
機器導入率
図表 VI-23 相関式からみた平均的な業務時間の減少割合(37 施設)
(令和4年度実証結果)
0
50
100
150
200
(分)
250
300
0%
2.9%
30%
6.8%
50%
8.4%
80%
6.4%
100%
2.1%
見守り機器導入割合
10%
38
入パターンであるため通常時の担当利用者数でみた場合の結果を用いた。また、機器の導入率と直接介
護・巡回・移動時間において、2 次の近似曲線を図中に示す。直接介護+巡回・移動時間と利用者に占め
る見守りセンサーの導入割合の相関を見てみると、導入割合0%の場合の業務時間に対して、導入割合
10%導入では 2.9%減少、導入割合 30%では 6.8%減少、導入割合 50%では 8.4%減少、導入割合 80%
では 6.4%減少する結果となった。
図表 VI-23 は、図表 VI-22 の近似式(y=76.481x2-81.882x+260.02)の x に機器の導入率(10%、30%、50%、
80%)を代入した結果である。
図表 VI-22 機器の導入率と「直接介護」及び「巡視・移動」時間合計の相関Ⅱ(37 施設)
(令和4年度実証結果)
450
事前
事後
400
直接介護+巡回移動時間
350
300
2.9%
6.8%
250
6.4%
8.4%
200
150
100
50
y = 76.481x2 - 81.882x + 260.02
0
0%
20%
40%
60%
80%
100%
機器導入率
図表 VI-23 相関式からみた平均的な業務時間の減少割合(37 施設)
(令和4年度実証結果)
0
50
100
150
200
(分)
250
300
0%
2.9%
30%
6.8%
50%
8.4%
80%
6.4%
100%
2.1%
見守り機器導入割合
10%
38